�R����ھ�C����ӺY�Ĺ����C��
���ߣ���Դ�Ƽ� ���ڣ�2014-05-25
4UX-550���R����ھ�C����ӺY�֙C�nj��ھ��P�P����������R��������ͨ�^�Y�����ӣ����R���������з��x������������һ�ȣ��Ա��˹���ʰ�b����4UX-550���R����ھ�C����ӺY�֙C�ęC���\�Ӻ��D��D2��ʾ��
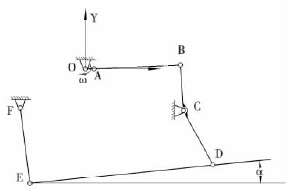
�D2 ��ӺY�C���\�Ӻ��D
���� �ϣ� �L�� �� �ϣ� ���� ω �D������ӺY �ģ� �İ� �b�A�Ǟ� α�� �R����ھ�C��ӺY������ֵ�� �룽 ω �� �� �ϣ� �� ���������� �� �� ֵԽ�����t��ӺY���������R� �������xԽ�������x���\��܉�E�^�������� �^���������ںY�����λ��ҲԽ�� �룽�� �r���˕r �������R����������δ���𣬻����Ҳ�������� �� �� �ɴ˿ɵ��� �� ֵ�Q�����������R������������ �ӺY���\�ӵ����ԣ����������\��܉�E���Q���� �����R������x�|���ĺÉĺͷ��x��Ч�� �� ������ �� �� �� ������ӺY�ڵ��U �ţ� �͓u�� �£� �������c�B�U ���� �Ď����£���ӺY �ģ� �����͵Ĕ[�� �� �������R��� ���������ӺY���������a���\�����@�N�\�����������R���������غY�����ǰ���ӡ���Ӻ�һ���̶ȵ��S����Ӻ��S�����ʹ�������R�������ﶶ�Ӻ���S����ֹ��ӺY�Ķ�����������aЧ�ʣ��������R���������ںY����\����r��ȫȡ�Q�ںY�ӵ��\�Ӆ���(sh��)�������������R���������܉��ֵķ��x��һ��Ҫ���ںY���ǰ����Ӻ��S���^�������ںY��ĺ��S���^С�ۣ��������P�I�~��